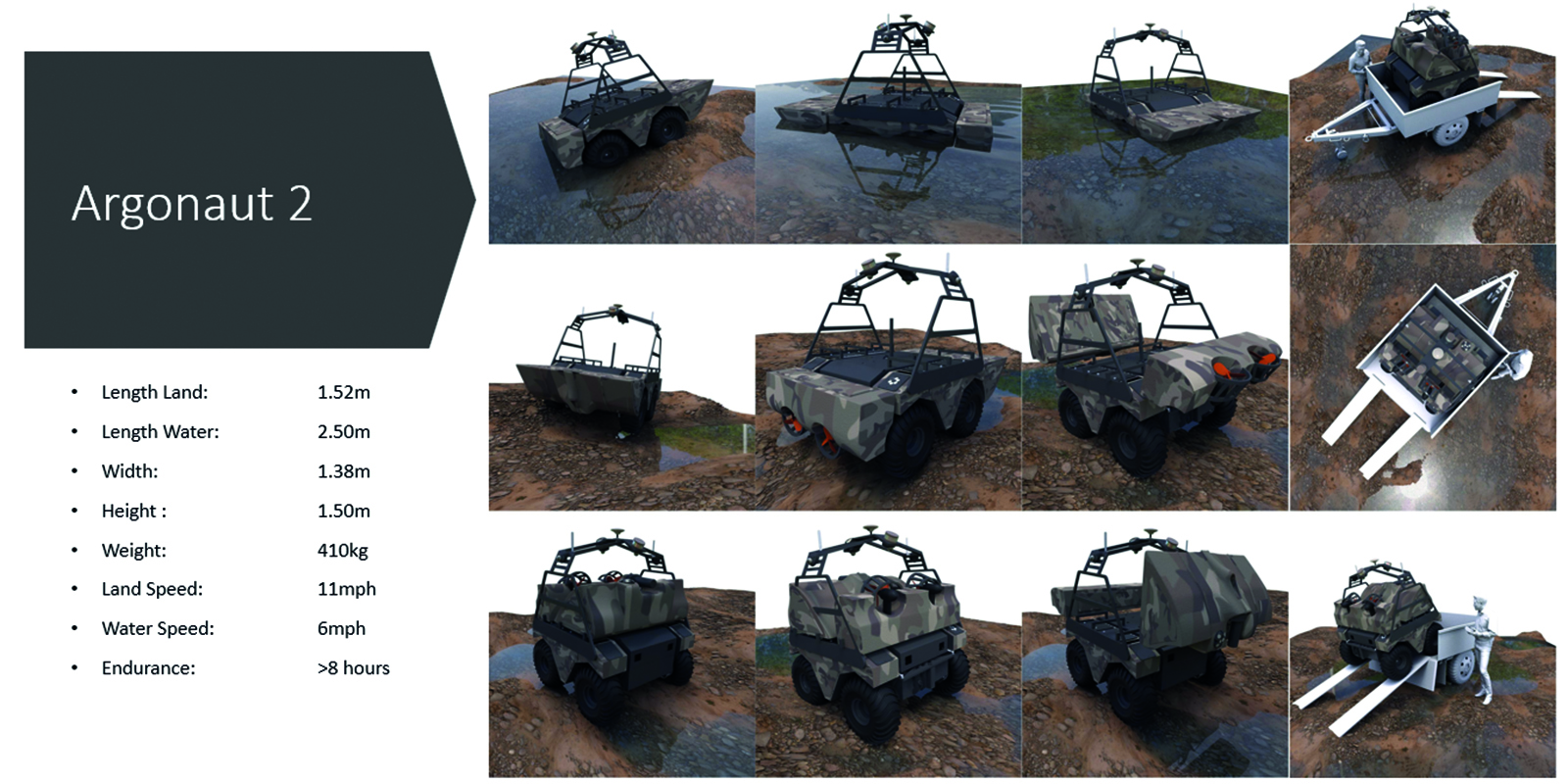
Axolotl: Compact Amphibious Autonomy for Tactical Surveying
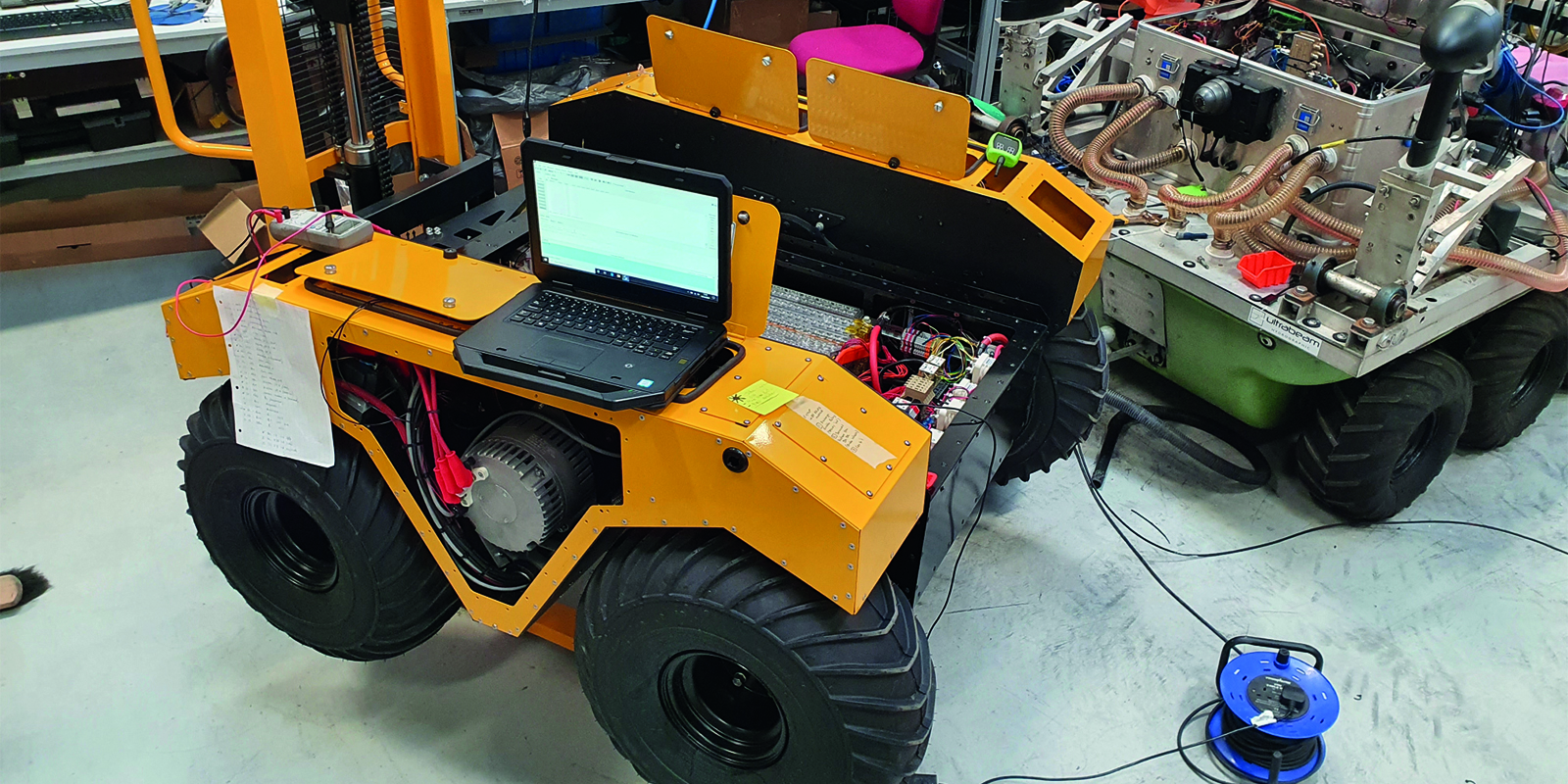
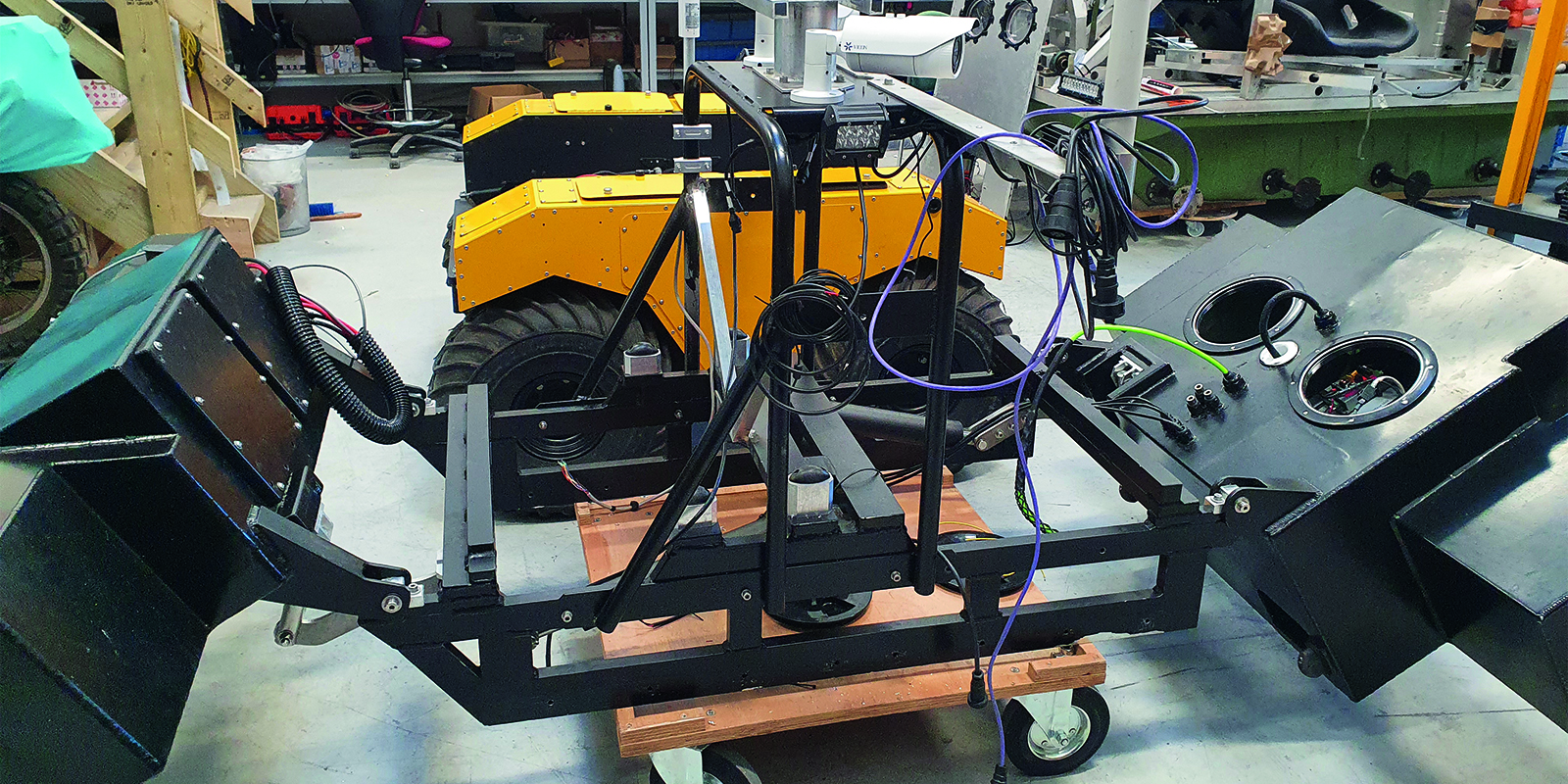
Building on the success of Project Argonaut, Axolotl is a lighter, more portable amphibious autonomous survey vehicle developed by Ultrabeam for land and water operations. Purpose-built for Phase 2 of Dstl’s Map the Gap competition—a defence R&D initiative focused on mapping river crossings in contested environments—Axolotl delivers high-performance survey capabilities in a compact, field-ready platform.
Endurance
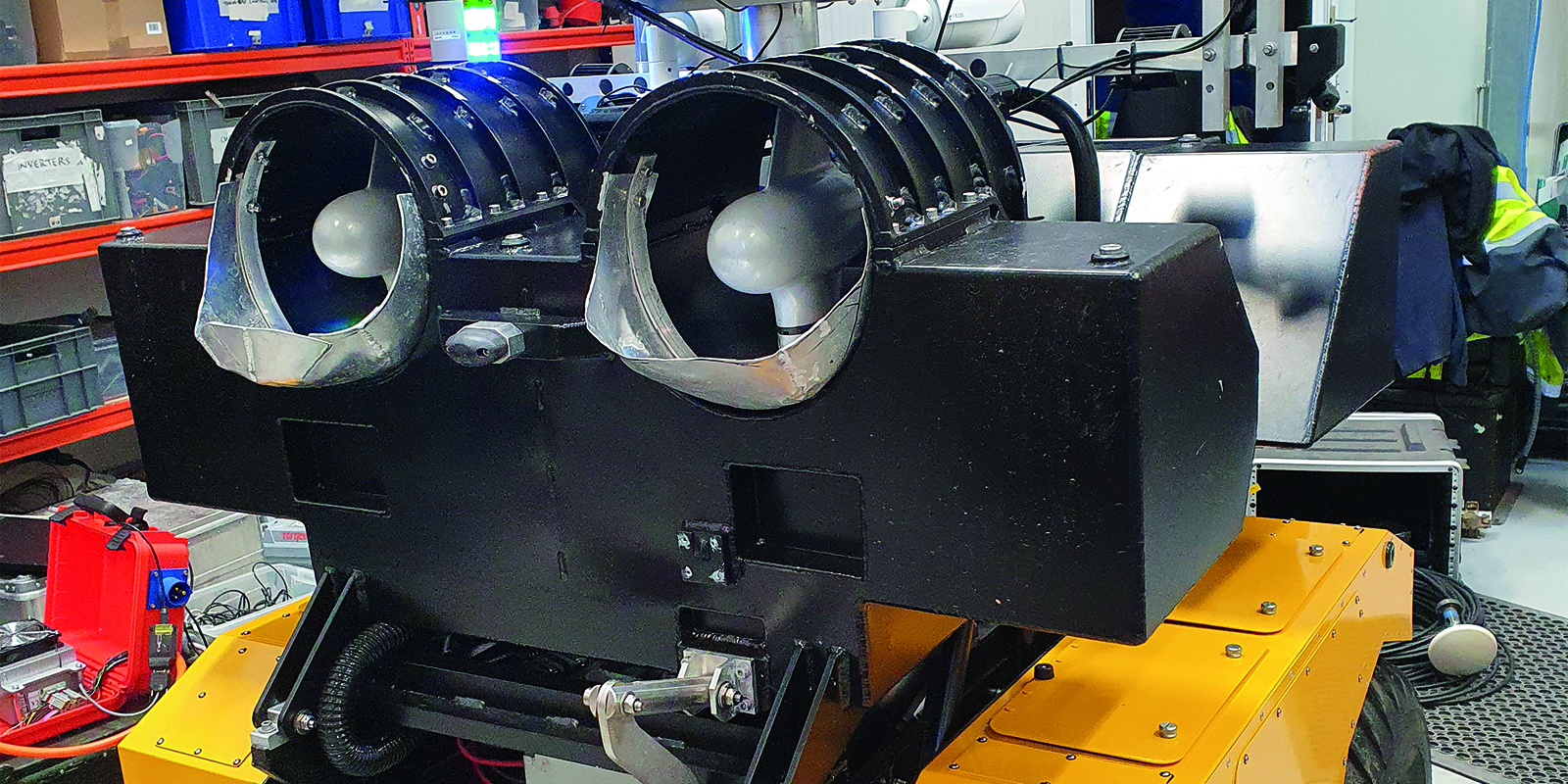
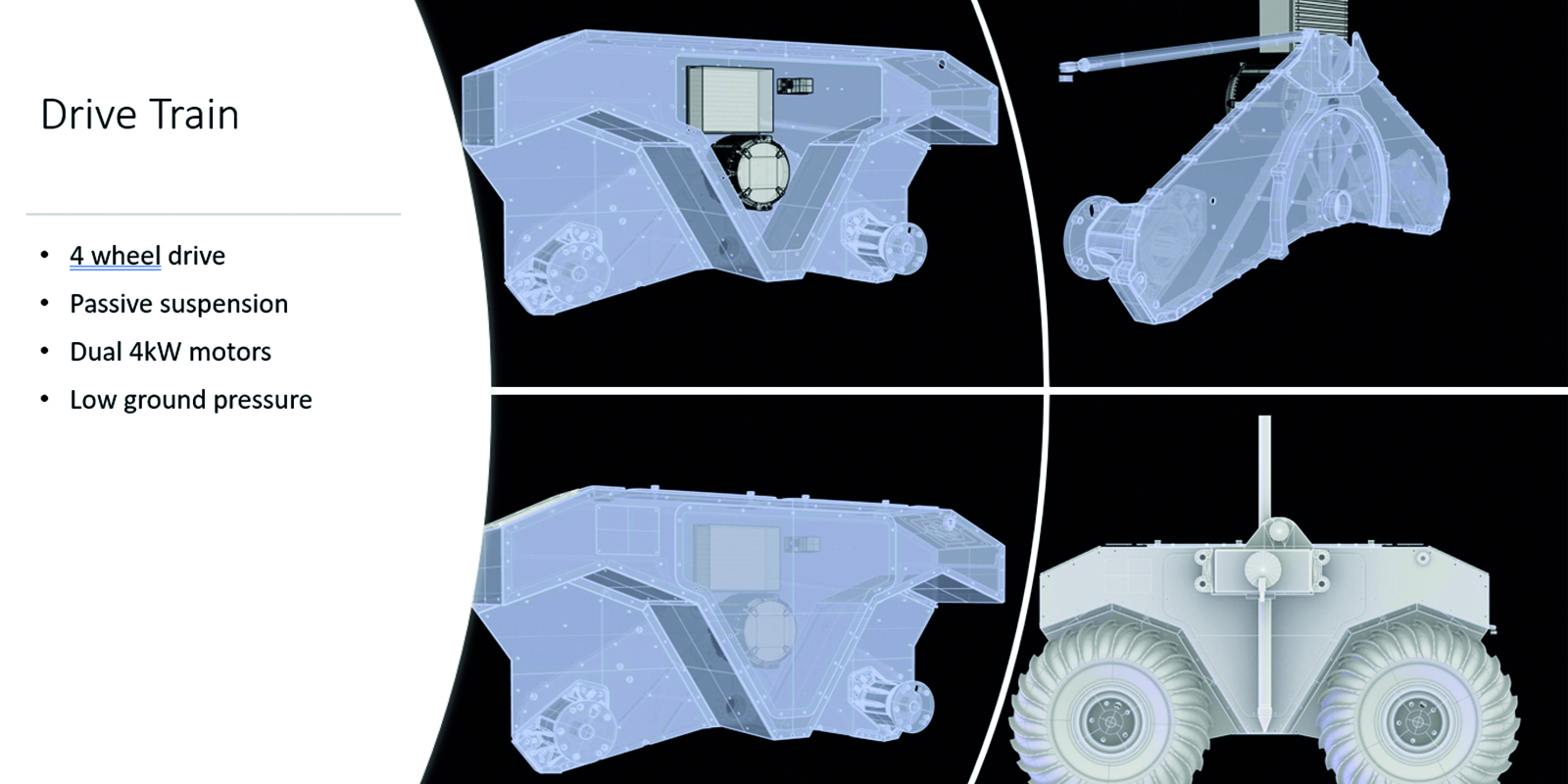
Powered by dual 8kW electric motors and a 4×4 wheel drive system, Axolotl reaches speeds up to 12 mph on land. On water, two Epropulsion 3kW thrusters (6HP equivalent) provide propulsion at speeds of up to 4 mph. With 48V Tesla battery modules (21.2kWh), the vehicle offers over 12 hours of endurance and a maximum range of up to 60 miles. Charging from 10% to 90% takes just two hours, ensuring operational readiness.
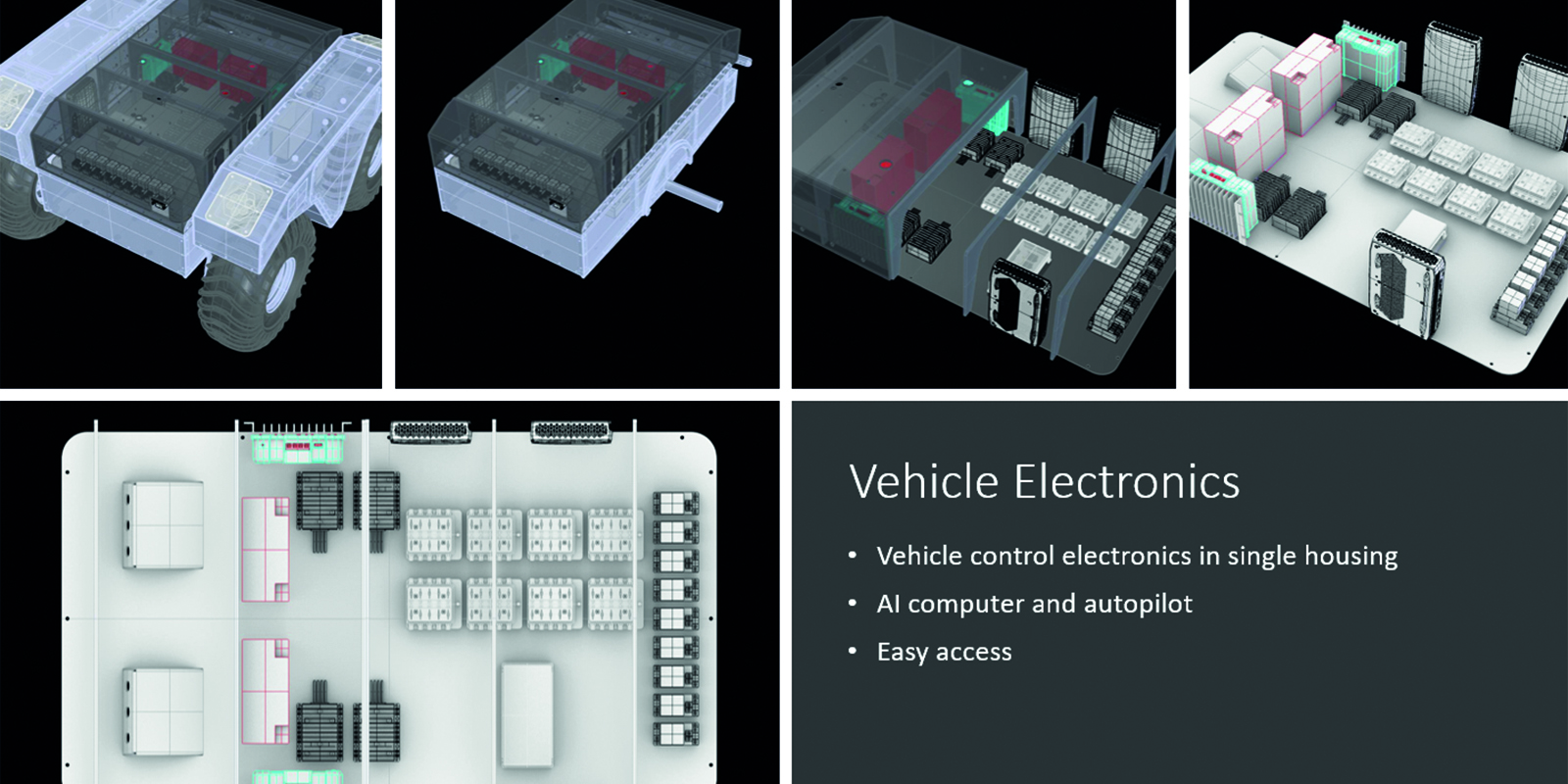
Technology
Equipped with a Norbit multibeam echosounder (MBES) and dual Ouster laser scanners, Axolotl captures rich real-time data on both terrain and bathymetry. This data supports immediate decision-making and is post-processed into detailed 3D visualisations, delivering efficient and accurate results across varied and complex environments.
Autonomous Operation
Designed for autonomous deployment, Axolotl minimizes the need for human presence in hazardous or remote environments. The system can be remotely operated from a safe distance, significantly reducing risk during critical survey tasks.




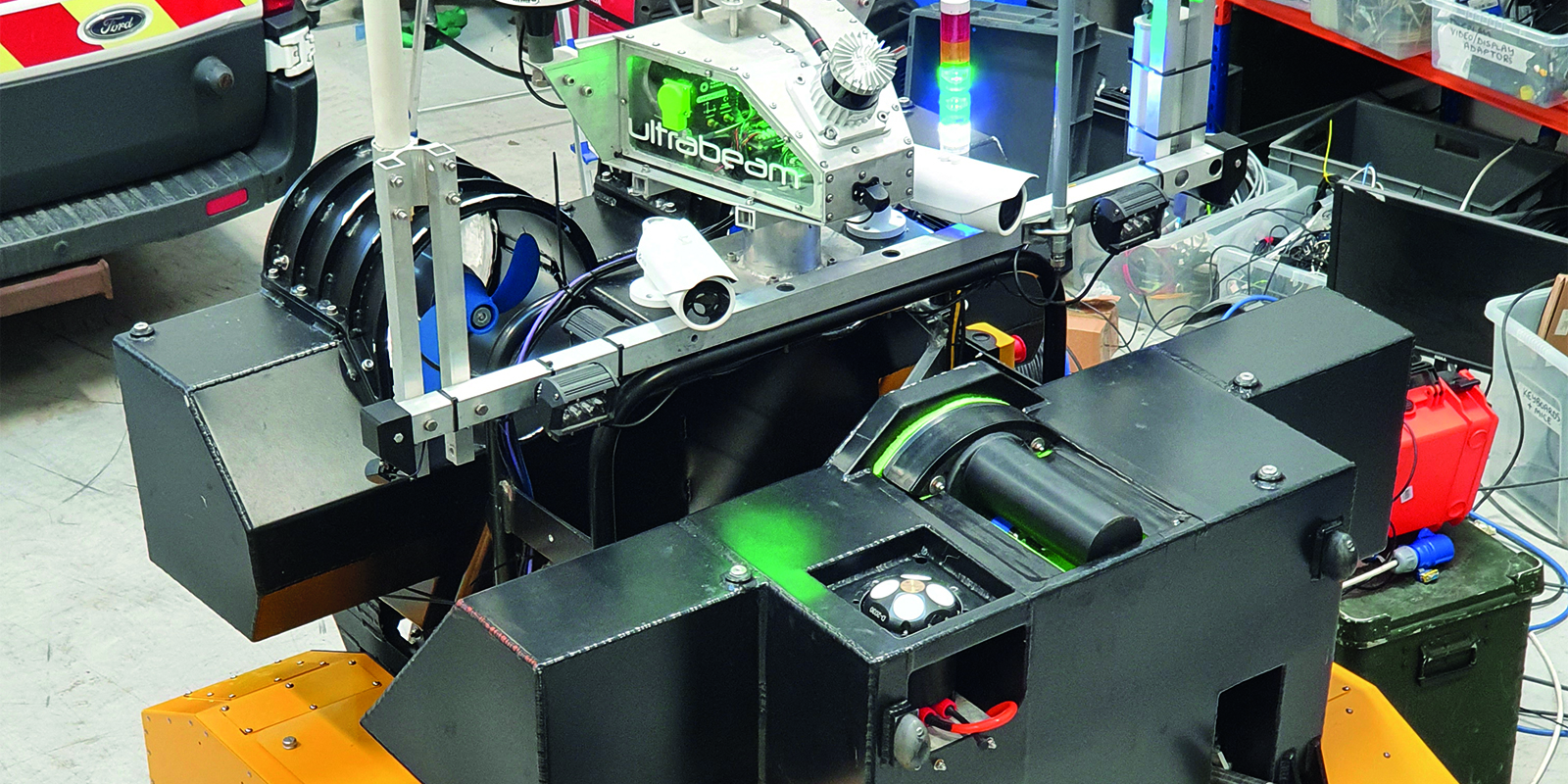













Axoloti is equipped with a diverse range of sensors that provide comprehensive data on ground conditions.
Backed by decades of experience with projects successfully completed throughout the UK, Europe, Middle East, Africa and Asia we’re ready to deploy our team and unique equipment wherever your next challenging project takes you.
Other Survey Platforms



